
Work stream 1: Tactile sensing of defects during composite manufacture
Host Institution: The University of Bristol
Lead Investigator: Mike Elkington
Aims
During traditional manual layup, skilled laminators use tactile sensing to constantly gather feedback of what is happening to the prepreg beneath their fingers. Out of plane defects such as wrinkles or bridges can be detected and the laminator uses this information to make minor adjustments to correct the developing defects and ensure part quality is to the required standard. Current automated processes lack any tactile sensing and rely on visual feedback once a ply has been laid up, at which point it may be difficult or impossible to correct the defect.
The aim of this project is to create a layup end effector that is capable of compacting composite plies onto a mould whilst simultaneously detecting any defects using real time tactile shape sensing. This will give automated layup systems a powerful new tool to ensure product quality, reducing the amount of rework and scrappage occurring during manufacturing.
Progress
This aspect of the project has developed an automated layup process which has real-time tactile feedback capabilities. It is based around the TacTip sensor developed at Bristol University by the Bristol Robotics Laboratory (BRL). The device uses a flexible rubber membrane which deforms around the surface of the objects being probed. A camera captures the deformation by recording the movement of small ‘pins’ protruding from the inner surface off the membrane. A combination of image analysis and statistical data processing uses this data to ‘feel’ the surface below the sensor.
Initial trials with the Tactip demonstrated that it was capable of detecting a wide range of typical composite layup defects, ranging from wrinkles and foreign objects to trapped backing film or misaligned plies. However, the existing TacTip uses a soft gel core, preventing it from applying any significant compaction force. Within the project a range of stiffer and more robust TacTip versions were developed to simultaneously apply layup pressure while sensing for defects. The most successful version replaced the gel core with an elastomer enabling over 40 times more force to be applied while retaining the tactile sensing properties. This new sensor has been demonstrated to repeatedly and reliably detect a range of typical layup defects while compacting prepreg onto curved mould surfaces.
This is believed to be the first example of combining tactile sensing with significant force application. Wrinkles, bridging, incorrect material types, stray bagging film and other defects have all been reliably detected while simultaneously compacting prepreg materials onto complex mould surfaces. Tactile sensing can provide a powerful new quality assurance tool for automated processing, checking for defects with every application of the layup end effector. Tactile feedback allows defects to be detected at the earliest possible stage in the manufacturing process, allowing corrections to be made and avoiding potentially lengthy inspection, rework or scrappage later in the manufacturing process.
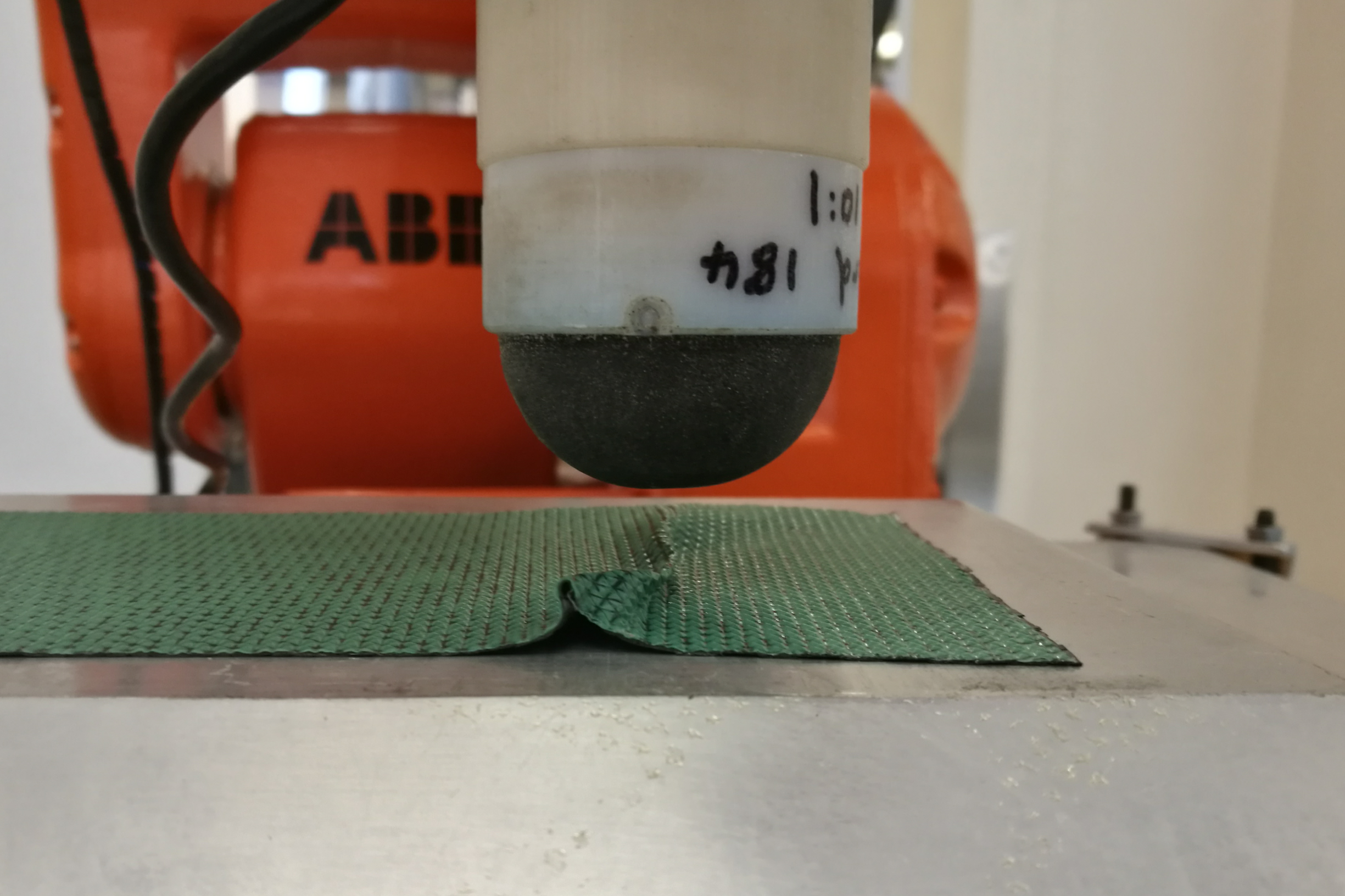
Figure 3. Developed ‘Tactip’ sensor simultaneously detects defects while applying consolidation pressure to a composite prepreg laminate using a 6-axis robot.
Key Achievements
- First documented detection of real composite defects using automated tactile shape sensing.
- Simultaneous tactile shape sensing with consolidation of prepreg onto complex moulds.