Intelligent Composite Lay-up by the Application of Discrete Technologies
Host Institution: Cranfield University
Lead Investigator: Ashutosh Tiwari
Aims
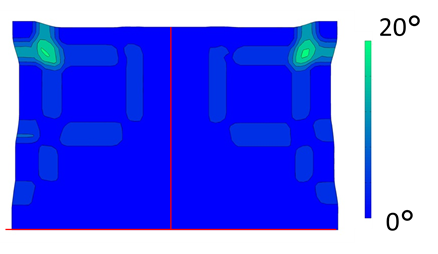
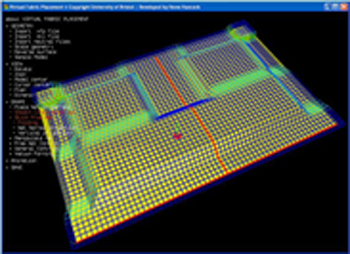
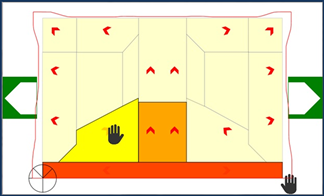
Hand layup is still the dominant forming process for the manufacture of a range of complex geometry and prepreg-based mixed material composite parts. The process however is still poorly understood and informed, which limits its productivity. This work seeks to address those issues, by proposing a system that enables a laminator to be guided in real-time, based on an unambiguous and predetermined instruction set, thus improving the standardisation of produced components.The first step is to understand the layup. A U-shape tool, representative of a number of complex geometry features, is assessed through kinematic drape simulation, to inform the best practice layup path while minimising global in-plane shear deformation. From this the appropriate action information was generated. The preferred simulated layup route is translated into an unambiguous instruction set by recording an experienced laminator’s forming actions, capturing the knowledge base. This information is then presented through a combination of discrete technologies into an integrated system that works as follows: the forming instructions are projected in a ‘Follow my Leader’ format by sequentially highlighting target features for layup, whilst hand positions are tracked using a Microsoft KinectTM in order to control and progress the instruction set. Verification tests indicate that overlaying the instructions directly onto the tool during forming, as a feature-by-feature process, augments the layup process and presents the original drape simulation information in recognisable forming processes.
Future work includes exploitation in a production environment where implementation of a final complete system will enable evaluation of potential for standardisation and productivity assessment between laminators, and use as a medium to reduce learning curves by providing more appropriate information than current laser guidance methods. The project team is planning a follow-on EPSRC proposal based on this work. The work won the best paper award in CIRP DET 2014 conference in the “Factory” category